2012 IRIS Workshop
Autonomously Deployed Deep-Ocean Seismic System
Jonathan Berger: Scripps Instution of Oceanography, John Orcutt: SIO, Gabi Laske: SIO, Jeff Babcock: SIO, John Brennan: Liquid Robotics, Inc.,
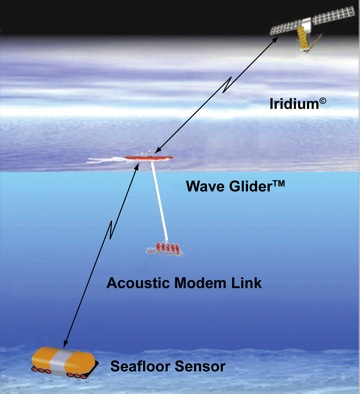
Traditionally, ocean bottom seismometers are deployed by ships, record data for a specific period of time and are retrieved when a ship returns to the location. As envisioned in the new project, a Wave Glider from Liquid Robotics will navigate to a specific location, keep on station by its own power, link with a Scripps ocean bottom seismometer and serve as a communications gateway for relaying live seismic data from the ocean surface to shore via satellite.
Full-resolution graphics file in original format: 0089.jpg
In Seismological Grand Challenges in Understanding the Earth’s Dynamic Systems (Lay, 2009), the need to extend seismological observations to the seafloor was clearly articulated. Of the 10 “Grand Challenges” identified, seven explicitly called for such seafloor stations to address the scientific problems. Yet for all the years of planning, pilot experiments, and attempts to add a global seismology component to the Oceans Observatory Initiative program, there are today no ocean bottom stations in the GSN. The primary reason for this is simply the cost of deployment and maintenance of the current generation technology. The ADDOSS program builds upon two proven technologies, autonomous wave-powered surface floats and ocean bottom seismometers, to develop a new generation instrument which, if successful, will provide long-term and near-real-time seismographic observations from the deep oceans – an instrument that will be affordable and practical to operate and maintain. In this effort, we are teamed with a small company, Liquid Robotics,Inc., which has developed a new, breakthrough technology in deep ocean observations and telemetry (Manley & Willcox, 2010). The Liquid Robotics Wave Glider technology comprises a surfboard-sized surface float tethered to a submerged glider, which converts wave motion into thrust and thereby tows the surface float. The overall concept is illustrated in Figure 2. The Liquid Robotics Wave Glider surface float is equipped with solar panels, a satellite modem, GPS, and a small processor to provide commands to steer the system via a rudder on the glider. The Wave Glider has demonstrated the ability to “swim” thousands of kilometers across the open ocean ( four are currently enroute across the Pacific Ocean, see http://liquidr.com/pacx/) and to hold station in a very small watch circle. Further, it has the capability to tow objects with little loss of speed. Leveraging the talents and strengths of Liquid Robotics and the SIO OBS team,
Acknoweldgements: This program is sponsored by the National Science Foundation through NSF Grant No. OCE-1126272 with matching funds provided by Liquid Robotics,Inc., the Cecil H. and Ida M. Green Foundation for Earth Sciences, and by Scripps Institution of Oceanography.
For further reading: Lay, T. (Editor), (2009) Seismological Grand Challenges In Understanding Earth's Dynamic Systems. Long-Range Science Plan for Seismology Workshop, September 18–19, 2009, IRIS, http://www.iris.edu/hq/publications/proposals_and_reviews Manley, J., Willcox, S., (2010). The Wave Glider: A persistent platform for ocean science, OCEANS 2010 IEEE - Sydney , vol., no., pp.1-5, 24-27, URL: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=5603614&isnumber=5603506 doi: 10.1109/OCEANSSYD.2010.5603614
Keywords: ocean_seismic